理论力学回顾
最近搞毕业设计遇到了一些理论力学的问题,发现自己忘记的好快,所以来回顾一下。理论力学是各种力学的基础,讨论物体不失效,不变形情况下运动和力的关系
回顾
理论力学主要分为三大部分:
- 静力学:讨论静止状态下物体的受力,主要包括力的平衡,力系的简化。
- 运动学:讨论物体的运动状态,主要包括运动的描述,复合运动速度和加速度的求解。
- 动力学:讨论力和物体的关系。主要解决给定力求运动轨迹、速度。动力学求解方法有很多种,任意一种即可。
静力学
静力学内容比较少,也比较简单,其主要思想是分而治之。这一块的核心就是画受力分析图,然后根据受力分析图求解约束力。其中要注意的地方就是力和力偶的概念,还有他们的相互转化。其主要内容包括:
- 约束类型和约束力的数量和方向
- 受力分析图
- 力对点的力矩:$M_O(\vec{F})=\vec r\times \vec F$;力对轴的矩:$M_z(\vec{F})=[M_O(\vec F)]_z$
- 力的平移$F’\rightarrow F+M$;力偶的平移 $M\rightarrow M$
- 平面任意力系的平衡条件 $\vec F=0,M=0$
- 超静定问题的求解
- 摩擦角和自锁
运动学
运动学稍微多一点,但是同样比较简单,就是公式变多了。这一块的核心是选择动点动系画运动图,然后根据对应的公式进行求解。要注意点的绝对运动、相对运动、牵连运动的概念,然后有个科氏加速度。这一块的知识在机械原理中会在此用到。其主要内容是:
点的运动的表示
点的绝对运动(动点对定系)、相对运动(动点对动系)、牵连运动(动系对静系),并且有以下关系:
速度:$\vec{v_a} = \vec{v_e} + \vec{v_r}$
加速度(牵连运动是平动):$\vec{a_a} = \vec{a_e} + \vec{a_r},a_r^n=v_r^2/R=\omega^2R$
- 加速度(牵连运动是转动):$\vec{a_a} = \vec{a_e} + \vec{a_r} + \vec{a_C},a_r^n=v_r^2/R=\omega^2R,\vec{a_C}=2\vec{\omega}\times\vec{v_r}$
刚体平面运动:
- 速度:合成法( $\vec{v_B} = \vec{v_A} + \vec{v_{BA}}$ )、速度投影法( $(\vec{v_A})_{AB}=(\vec{v_B})_{AB}$ )、瞬心法
- 加速度:合成法( $\vec{a_B} = \vec{a_A} + \vec{a_{BA}},\vec{a_{BA}}=\vec{a_{BA}^n}+\vec{a_{BA}^t}$ )
动力学
这一块内容很多很杂,求解方法也有很多。主要有两派,一派是以牛顿为主导的经典力学解法,在笛卡尔坐标系下用动量动量矩动能定理求解,另一派是以拉格朗日为主导的分析力学的解法,在广义坐标系下用拉格朗日方程求解。其中,分析力学以经典力学中的达朗贝尔原理和虚位移原理作为基础,主要研究功能关系,不需要复杂的运动学求解。
在这个里面最重要的思想是守恒,还有达朗贝尔原理、虚功原理和广义坐标系。这一块也是理论力学的核心,同时,这一块的知识在材料力学中会使用到。
经典力学主要内容如下:
- 质心运动定理(牛二) $m\vec {a_C}=\sum \vec{F_i^{(e)}}, J_C\alpha=\sum M_C(\vec{F_i^{(e)}})$
- 质点系动量定理 $d(\sum m\vec v)/dt=\sum \vec {F^{(e)}_i}$
- 质点系动量矩定理 $d[M_O(m\vec{v_C})+J_C\omega]/dt=\sum M_O(\vec{F_i^{(e)}})$
- 质点系动能定理 $T_2-T_1 = \sum W$
- 达朗贝尔原理(动静法):惯性力代替加速度 $\sum\vec{F_i^{(e)}} + \sum\vec{F_I}=0,\sum M_O{(\vec{F_i^{(e)}})}+\sum M_O(\vec{F_I})=0,\vec{F_{IR}}=-m\vec {a_C},M_{IC}=-J_C\alpha$
- 虚位移原理:设定虚位移,研究虚位移之间的关系,所有主动力虚功为零$\sum \vec{F_i}·\delta\vec{r_i}=0$
分析力学主要内容如下:
N维广义坐标下的坐标矢量 $\delta \vec{r_i}=\sum\limits_{k=1}^N(\partial\vec{r_i}/\partial q_k)\delta{q_k}$
广义坐标下的平衡条件:广义力为零 $Q_k=\sum\limits_{i=1}^n(F_{ix}\frac{\partial x_i}{\partial q_k}+F_{iy}\frac{\partial y_i}{\partial q_k}+F_{iz}\frac{\partial z_i}{\partial q_k})=0$
确定广义坐标->写出质点在广义坐标下的表达式->表达式对广义坐标求导->求解广义力->广义力为0求解未知量
对保守系统(无外力的系统),质点系的势能对于每一个广 义坐标的偏导数分别等于零 $Q_k=-(\partial V/\partial q_k)=0$
动力学普遍方程:广义力与广义惯性力所作的虚功和为零 $\sum\limits_{i=1}^N(Q_k-\sum\limits_{k=1}^nm\ddot r·\frac{\partial r_i}{\partial q_k})\delta q_k=0$
拉格朗日方程
小练习
1 | |
这个题目的来源是模拟 https://www.bilibili.com/video/BV17A411h7wJ 这个视频 10:33 的内容,通过这个巩固一下自己的理论力学和编程能力。
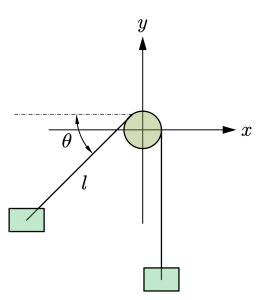
已知两个物体通过一根绳子挂在一根柱子上,其中有一个物体有动能,该物体运动至最高处的状态如图所示,忽略摩擦以及柱子的直径,求其运动方程
取如图所示$m,M$为物体质量,$l,\theta$为有动能的物体到柱子的长度和绳子的角度,绳子总长S,易得两个物体的坐标可以表示为
对时间求导,可以得到他们的速度为
1 | |
求解其动能和势能为
1 | |
L = T - V为
1 | |
由拉格朗日方程得
1 | |
1 | |
整理得到微分方程
取初始条件
用数值(暴力)解法可以写出迭代式
这样就可以求解出位置关于时间的函数,绘制成动画如下